
Research Topics
This page contains some of my recent and past research topics. For a more complete picture, please see the publications page.
Efficient Reinforcement Learning for Unceratin Systems
Reinforcement learning (RL) is a goal-oriented learning strategy wherein the agent learns the policy to optimize a pre-defined reward by interacting with the environment. For its uniqueness in data driven concepts, effectiveness in reaching optimal behavior, and adaptiveness to uncertain environment, RL has undergone rapid progress in control community. Our focus is to develop effective and practical RL algorithms for uncertain nonlinear systems. Our main contributions include
A control framework that first bridges the gap between disturbance rejection control and RL.
A control framework that simultaneously indefitifies the system model and approximates the optimal policy.
Relaxed and verifiable PE condition; no probing signal; no initial admissible control requirement.
Publications:
Maopeng Ran, Juncheng Li, Lihua Xie. Reinforcement learning-based disturbance rejection control for uncertain nonlinear systems. Preprint.
Maopeng Ran, Lihua Xie. Adaptive observation-based efficient reinforcement learning for uncertain systems. Preprint.
Multi-Agent Systems with Limited Data Rate
Multi-agent systems have attracted great attention in recent years owing to their potential applications in a wide variety of tasks. In most cases, the agents communicate with their neighbours through a digital network having limited communication capacity. We investigate the limited data rate problem for uncertain nonlinear multi-agent systems with partially measurable states. An extended state observer (ESO) based protocol with dynamic encoding and decoding is proposed. Our main contributions include
The proposed protocol is capable of handling multiple nonlinearities and uncertainties.
The proposed protocol achieves the lowest data rate. Merely one bit information exchange suffices to guarantee the consensus of higher-order multi-agent systems.
The proposed protocol is capable of shaping the transient consensus performance.
Publications:
Maopeng Ran, Lihua Xie. Distributed output feedback consensus of uncertain nonlinear multi-agentsystems with limited data rate. The 38th Chinese Control Conference (CCC2019), pp. 5733-5739. (Guan Zhao-Zhi Award) [Link, PDF]
Maopeng Ran, Lihua Xie. Practical output consensus of nonlinear heterogeneous multi-agent systems with limited data rate. Preprint.
Maopeng Ran, Lihua Xie. Data rate for output feedback consensus of uncertain nonlinear multi-agent systems. International Journal of Robust and Nonlinear Control, 2020, 30(14): 5430-5445. [Link]
Theory and Application of ADRC
ADRC (Han, 2009) is an efficient methodology for uncertain nonlinear systems. The bais philosophy of ADRC is to view the “total uncertainty” as an extended state of the system, and then estimate it using an extended state observer (ESO), and finally compensate for it in the control action, in real time. We maintain a focus on studying both theoretical and practical aspects of ADRC. Our main works in ADRC include
Design and analysis of ADRC for saturated nonlinear systems.
Proposed a dynamic inversion aided ADRC scheme for nonaffine-in-control systems.
Found that the gain of the ESO is limited by the input time-delay.
Prposed a delayed activation beckstepping scheme for ADRC to handle unmatched uncertainties.
Proposed a new ESO to lower the requirement of the control gain.
Successfully implemented ADRC in several robotic systems and flight vehicles. [video]
Selected publications:
Maopeng Ran, Qing Wang, Chaoyang Dong, Lihua Xie. Active disturbance rejection control for uncertain time-delay nonlinear systems. Automatica, 2020: 112: 108692. [Link, PDF]
Maopeng Ran, Qing Wang, Chaoyang Dong. Active disturbance rejection control for uncertain nonaffine-in-control nonlinear systems. IEEE Transactions on Automatic Control, 2017, 62(11): 5830-5836. [Link, PDF]
Maopeng Ran, Qing Wang, Chaoyang Dong. Stabilization of a class of nonlinear systems with actuator saturation via active disturbance rejection control. Automatica, 2016, 63: 302-310. [Link, PDF]
Advanced Guidance & Control for Flight Vehicles
The area of guidance & control is particularly important and challenging in fulling the growing requirements for safety, performance and autonomy of modern flight vehicles. Our main works in advanced guidance & control for flight vehicles include
Proposed an entropy particle swarm optimization (EPSO) based spacecraft optimal rendezvous strategy.
Developed two predictor-corrector reentry guidance algorithms for hypersonic vehicles.
Developed a fuzzy integrated missile guidance & control law.
Developed a robust partial integrated missile guidance & control law.
Selected publications:
Maopeng Ran, Qing Wang, Delong Hou, Chaoyang Dong. Backstepping design of missile guidance and control based on adaptive fuzzy sliding mode control. Chinese Journal of Aeronautics, 2014, 27(3): 634-642. [Link, PDF]
Maopeng Ran, Qing Wang, Chaoyang Dong, Huadong Mo. ANFIS-based predictive reentry cuidance for hypersonic vehicles. Acta Armamentarii, 2014, 35(12):2016-2022. [Link]
Maopeng Ran, Qing Wang. Spacecraft rendezvous trajectory optimization method based on EPSO. Journal of Astronautics, 2013, 34(9):1195-1201. [Link]
Control for Saturated Linear Systems
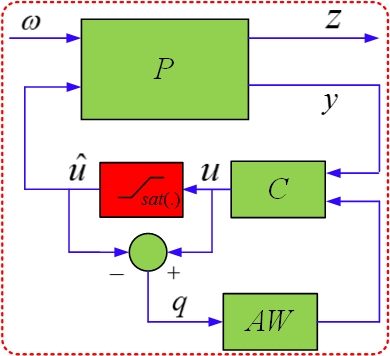
Saturations are ubiquitous in engineering systems. The design and analysis of a system subject to saturation is not only theoretically challenging, but also practically imperative. We have investigated the anti-windup technique for saturated linear systems. Our main works include
Investigated different activation mechanisms of the anti-windup compensator.
Simultaneoulsy synthesis of the linear controller and anti-windup compensator.
Proposed a multi-stage anti-windup design approach.
Selected publications:
Maopeng Ran, Qing Wang, Chaoyang Dong, Maolin Ni. Multi-stage anti-windup design for linear systems with saturation nonlinearity: enlargement of the domain of attraction. Nonlinear Dynamics, 2015, 80(3): 1543-1555. [Link, PDF]
Maopeng Ran, Qing Wang, Maolin Ni, Chaoyang Dong. Simultaneous linear and anti-windup controller synthesis: delayed activation case. Asian Journal of Control, 2015, 17(3): 1027-1038. [Link, PDF]